
单侧加个板砖?小场面:






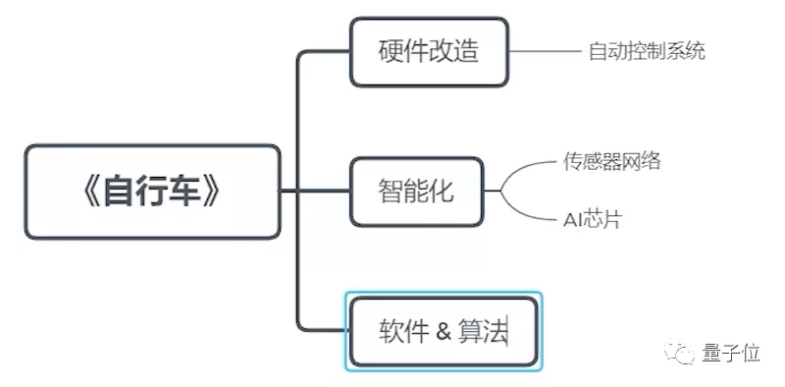
把自行车做成自动驾驶,共分几步?
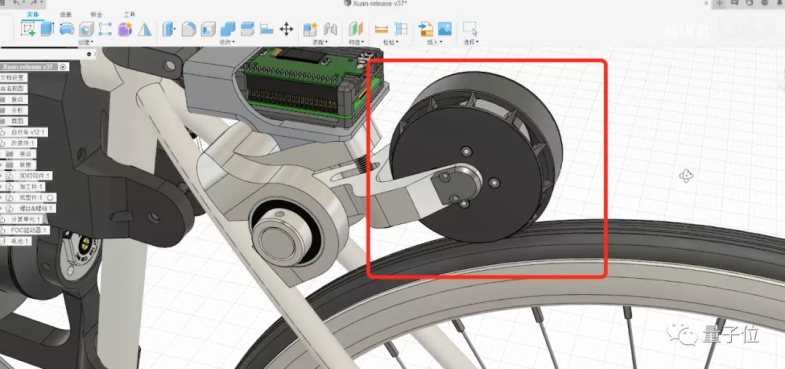
硬件改造:因为自行车是一个欠驱动系统,所以先要做的就是让它站稳,然后跑起来。这一步将涉及一套复杂的自动控制系统。
智能化:毕竟自动驾驶嘛,“工具人”就得被抹去。因此,这一步便是搭载一整套传感器组成的感知网络,以及一个算力足够强大的计算芯片作大脑。
软件和算法:最后一步,便是在上述的硬件基础上,开发、实现一套感知和控制算法。稚晖君称之为“注入灵魂”。
自行车怎么自己保持平衡?

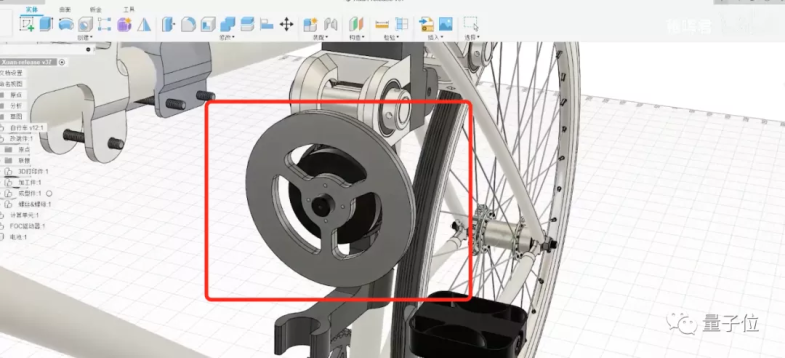
自行车的“机器大脑”
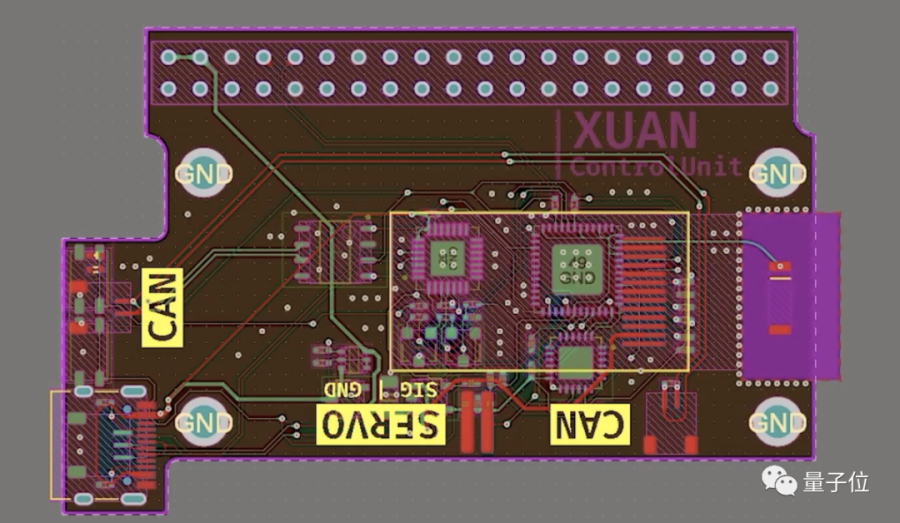


自行车的“机器心脏”

最后,注入灵魂

为什么要造XUAN?

小小心意,大大鼓励
本文章转载自原作者 : 量子位
举报



















 沪公网安备 31011502009179号
沪公网安备 31011502009179号
为未来的智能骑行体验提供了载体平台
XUAN里的“U”
代表的意思是unNATURAL
“正经翻译”就是——没上过Nature……
哈哈哈哈哈哈哈哈哈哈哈