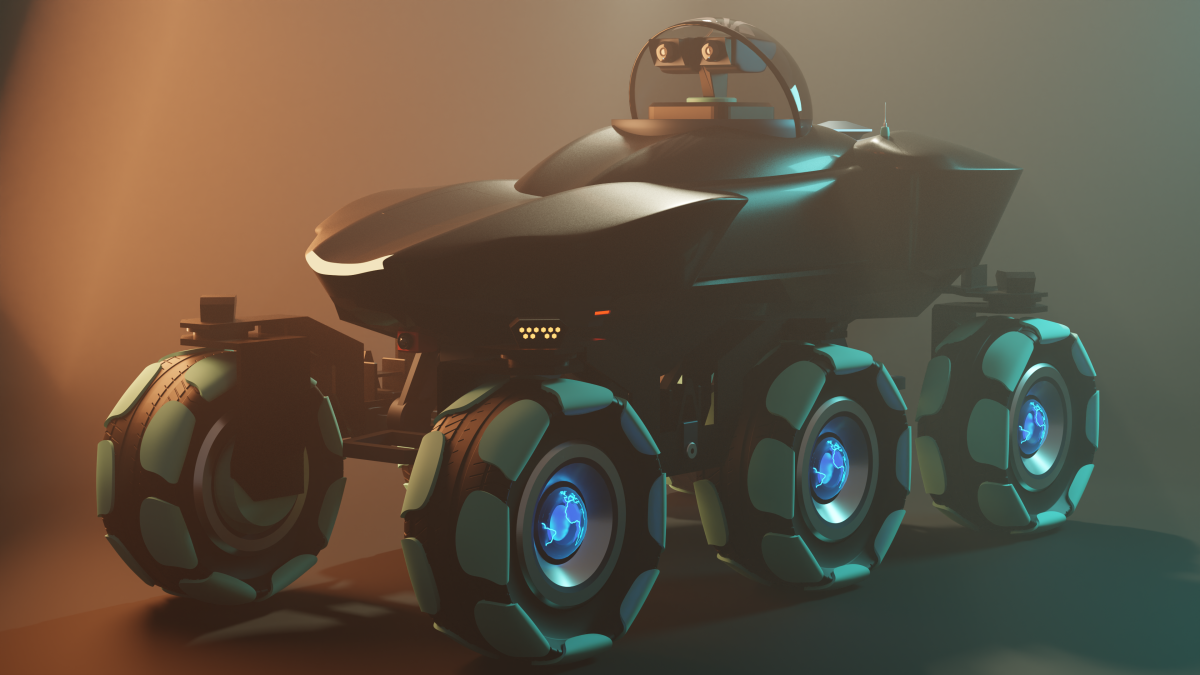
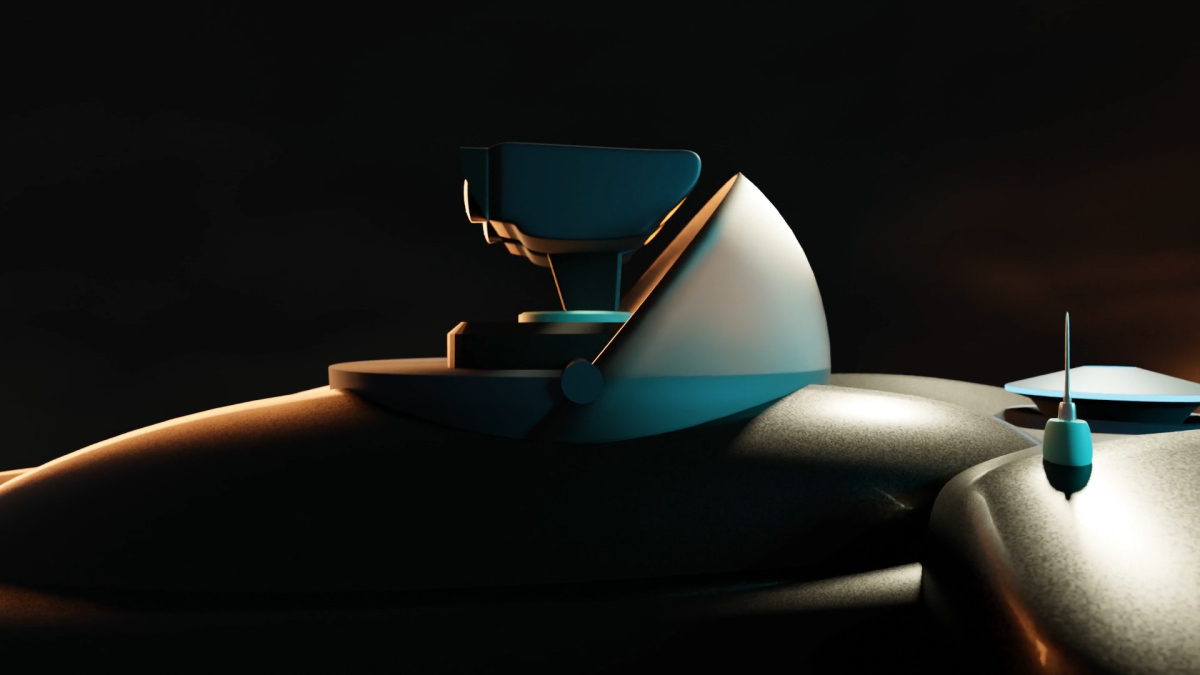
智能生态环境信息采集无人车设计
原创
交通工具
2022届本科毕业设计作品·
毕业展·
湖南大学设计艺术学院·
无人车·
信息采集
5赞|2评论|615人气|3收藏|2022-07-04 11:09:56
关注
私信















 沪公网安备 31011502009179号
沪公网安备 31011502009179号
厉害
请教一下用的什么渲染器?