 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
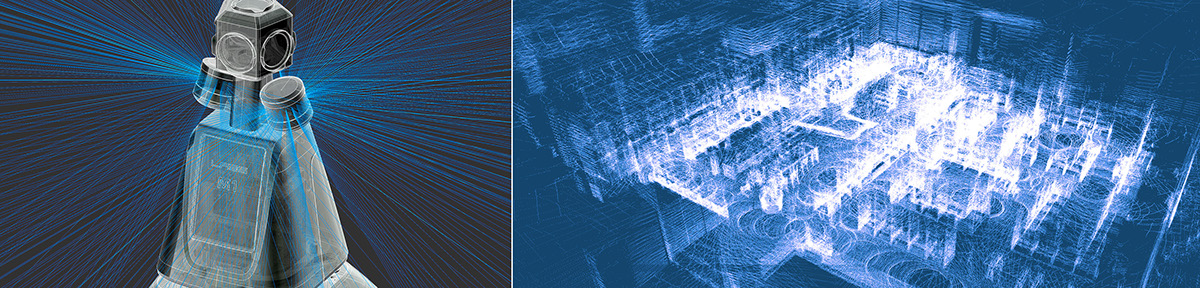
M1将激光扫描的点云数据转换为三维网格空间数据,并利用精确测绘技术生成室内三维地图。
 点评此图
点评此图
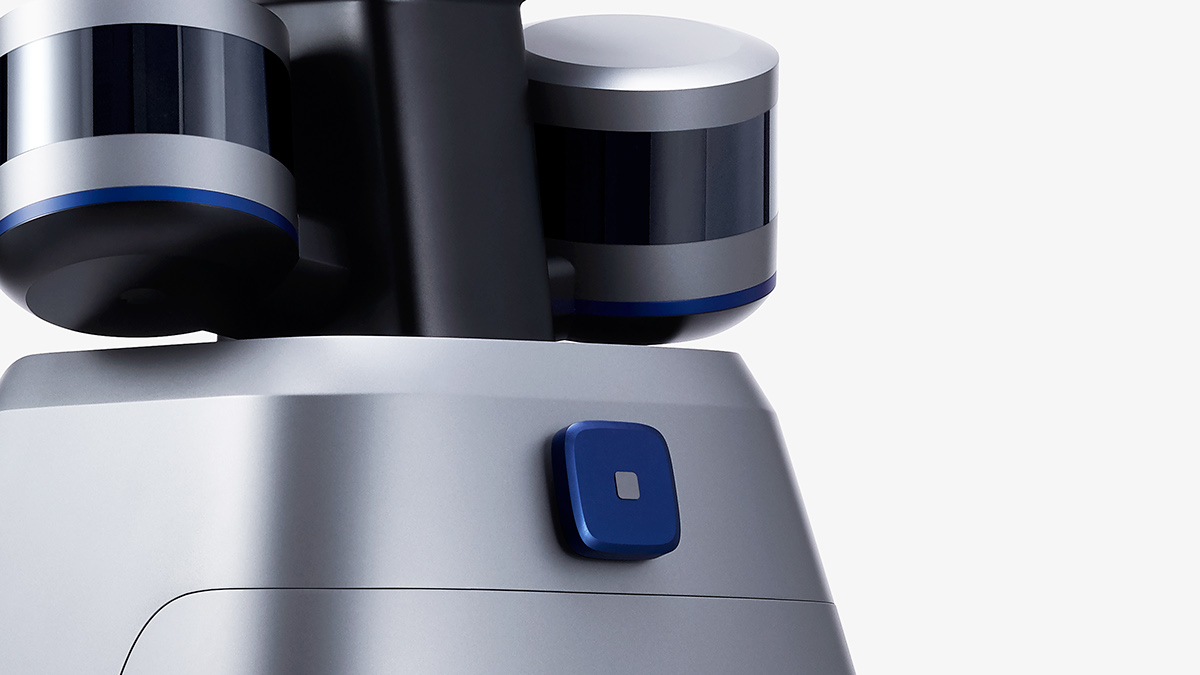
设计的重点是最大限度地利用LiDAR(光探测和测距)扫描范围,同时提高驾驶安全性和获得精确的比例感。LiDAR的两个上16通道固定在唯一的偏角和理想的高度,最大的扫描面积。每个LiDAR以每秒300000点的速度扫描,水平视场为360度,垂直视场为30度。M1是490毫米宽,允许它通过大多数门,并有一个方形足迹,最大限度地利用轴距和踏面,同时尽量减少过高,以提高驾驶安全。M1具有锥形形状,底部有沉重的模块,如马达和电池,这降低了重心,提高了驾驶安全性。
 点评此图
点评此图
 点评此图
点评此图
除了体现Naver实验室对未来技术的展望外,该产品的设计重点还包括性能精度和功能精度。由于胸部和底部的照明指示灯,用户可以从任何方向一眼就认出M1的状态。
 点评此图
点评此图
 点评此图
点评此图
由于M1是一个自主驾驶机器人,在后面有一个紧急停车按钮,以防突然故障。背面的分型线用于维护,底部的两个盖子和背面的两个盖子将两个电池分开。M1配备有4个机械轮,使用轮内电机,向任何方向移动,以平滑扫描。
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图

10赞 3评论 2264人气

17赞 3评论 4609人气

22赞 3评论 3613人气

15赞 6评论 2985人气


 关注
点赞
收藏
关闭弹幕
留言
关注
点赞
收藏
关闭弹幕
留言
确认要删除该条评论吗?
小小心意,大大鼓励
最高赞赏200元
使用支付宝扫描二维码完成支付
使用微信扫描二维码完成支付
当前余额:¥0.00
支付操作会向你普象账户的注册手机号发送验证码
请注意查收

扫一扫添加
普象商务
扫一扫添加
客服微信

扫一扫下载
手机APP

请关注公众号iamdesign或扫码关注
 沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
不久的将来为许多商业和工业应用开辟了可能性
外形很萌
设计这个难度系数有点高啊