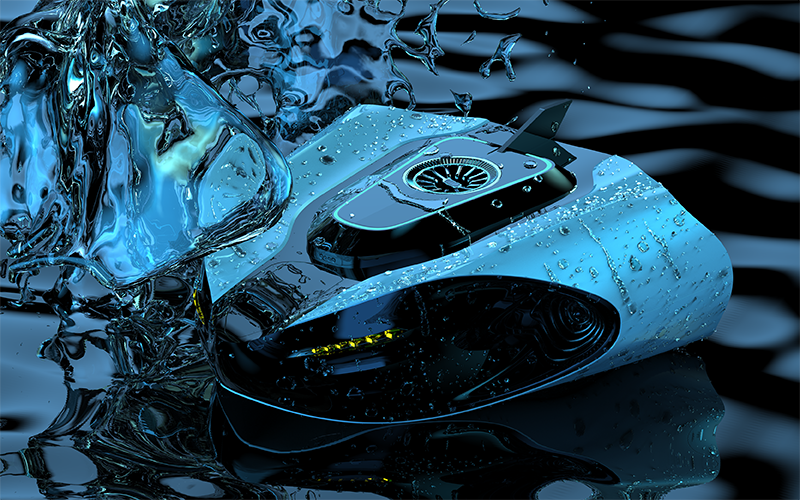
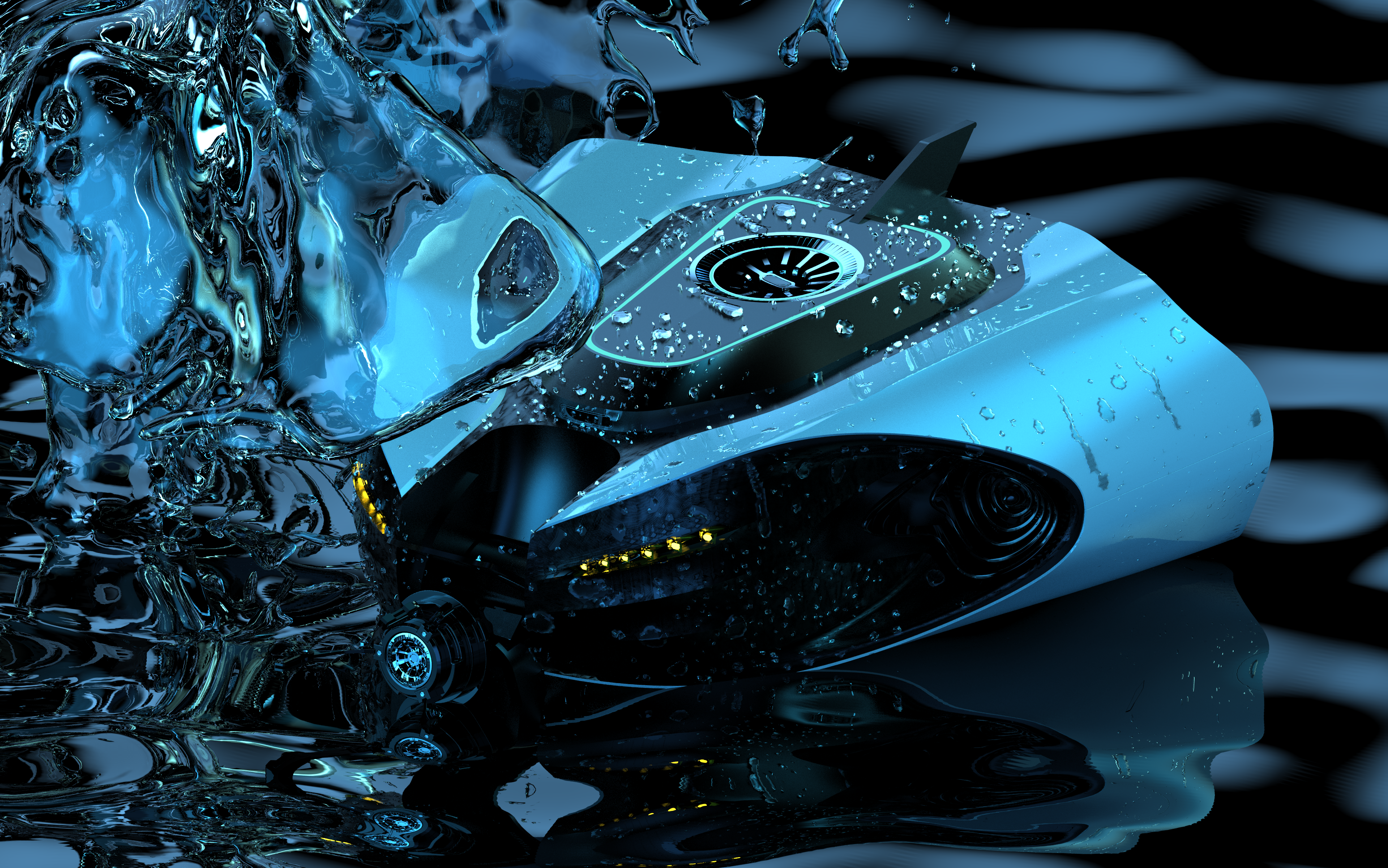
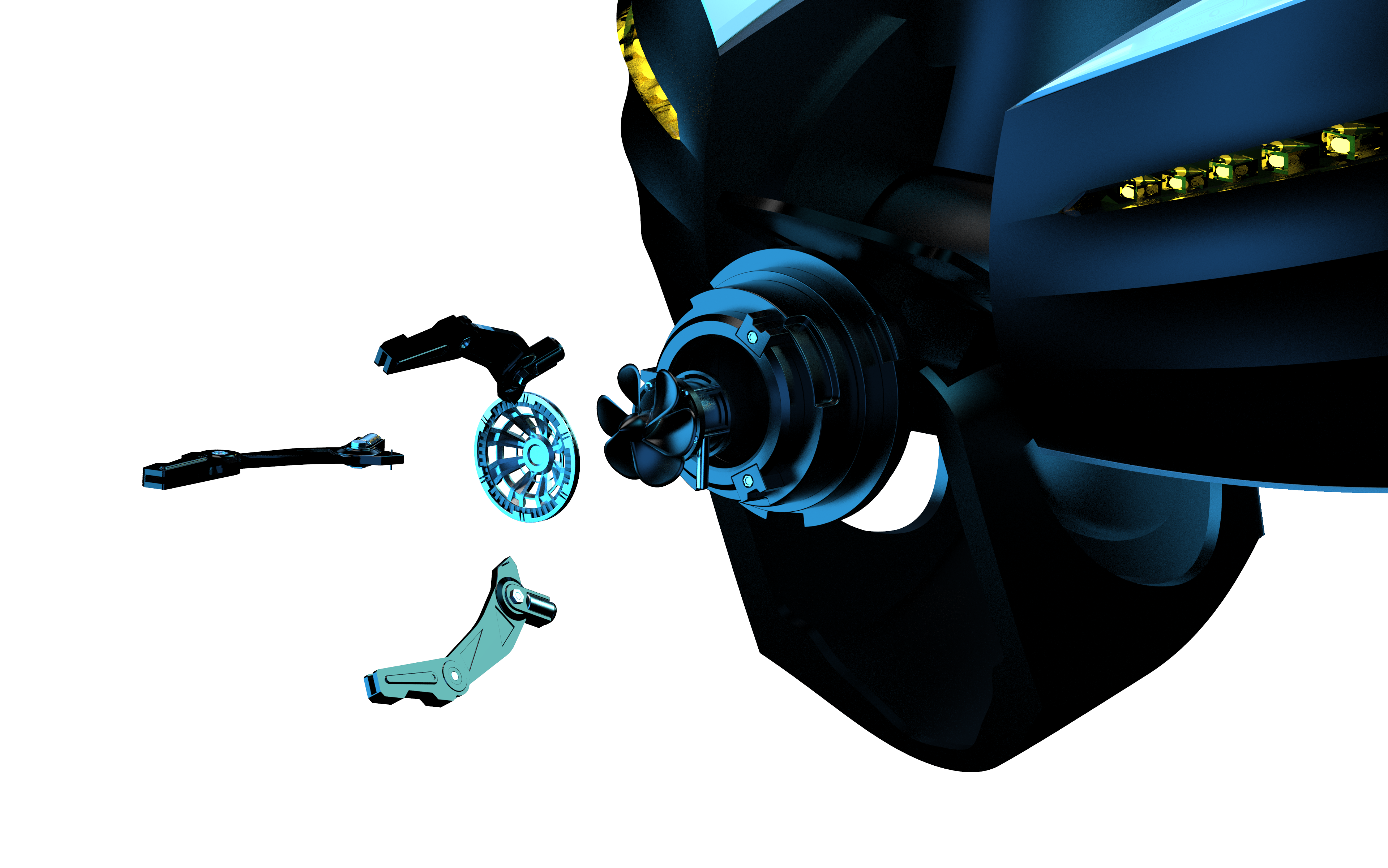
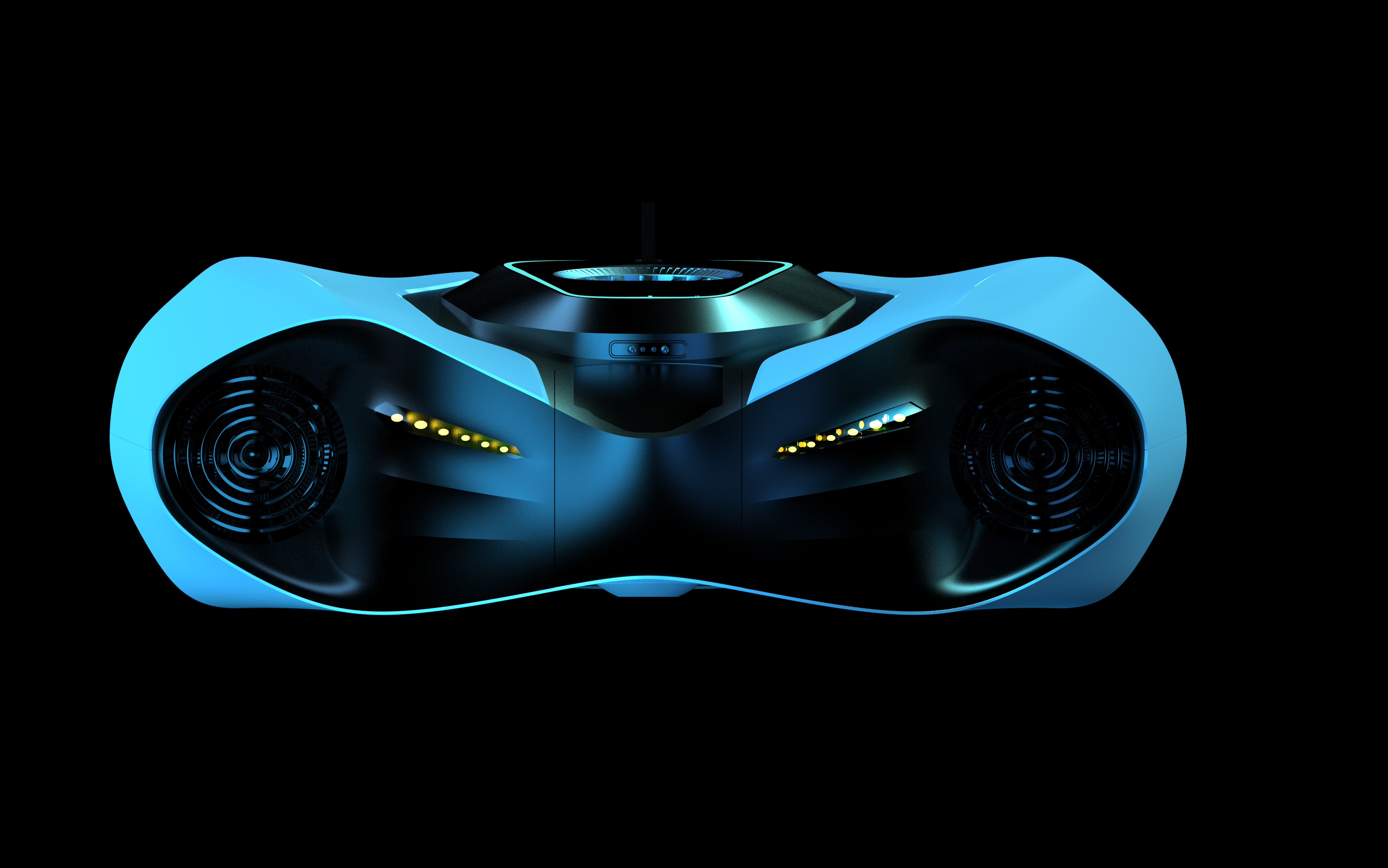
该水下机器人为娱乐型,因此造型更加偏向流体,包覆式造型,使用到的结构是更为轻量化的“2+1”动力结构。主要采用仿生设计,整体给人的感觉是一条灵活的小鲨鱼。机械爪结构隐藏于其内,通过翻折结构展开机械爪,可根据是否使用情况来翻折出机械臂,在机械爪顶部有一个吸取的小涡轮,通过其吸取功能在抓取时进行辅助,使物体更容易被抓取。
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
小小心意,大大鼓励
本作品版权归 xiongyunfei 所有,禁止匿名转载及个人使用,任何商业用途均需联系原作者。
举报 关注
点赞
收藏
关闭弹幕
留言
关注
点赞
收藏
关闭弹幕
留言
确认要删除该条评论吗?
小小心意,大大鼓励
最高赞赏200元
使用支付宝扫描二维码完成支付
使用微信扫描二维码完成支付
当前余额:¥0.00
支付操作会向你普象账户的注册手机号发送验证码
请注意查收

扫一扫添加
普象商务
扫一扫添加
客服微信

扫一扫下载
手机APP

请关注公众号iamdesign或扫码关注
 沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司


渲染效果真好