R1是一种移动制图系统,旨在为自动驾驶汽车创建混合高清(HD)地图。 基于NAVER专有的制图解决方案的混合高清地图是通过有机整合从现有精密航空照片中检索到的信息以及R1车辆收集的点云信息而创建的高清地图。 2D和3D数据均使用独特的算法处理,该算法会自动提取绘制HD地图所需的特征。 与传统的MMS设备相比,这降低了生产成本,同时确保了相同水平的准确性和新近度。
移动映射系统:高清地图对于自动驾驶车辆精确确定位置并搜索最佳路线至关重要。 基于独特的航拍3D制图技术与轻量级MMS系统R1的组合,NAVER正在开发混合高清地图,该地图可保持所需的高精度,但成本较低。 首先,使用AI技术从航拍图像生成正射影像,以提取道路网络和道路标记功能。 由此产生的空间高清数据构成了我们独特的混合高清地图的基础。 接下来,R1在移动时在HD地图顶部收集点云。 NAVER通过将传感器融合数据集成到我们的高清地图中来开发厘米级定位技术,以用于高层建筑干扰GPS信号的区域。 它的混合高清地图为自动驾驶汽车的更高级研究铺平了道路。
随着更多种类的自动驾驶机器和服务的引入,高清地图的重要性只会增加。 还可以期望出现更多基于HD的高级算法。 通过混合高清制图技术,我们希望引入一种新的高清地图解决方案,该解决方案既能满足保持数据准确性又能使生产成本保持合理的要求。
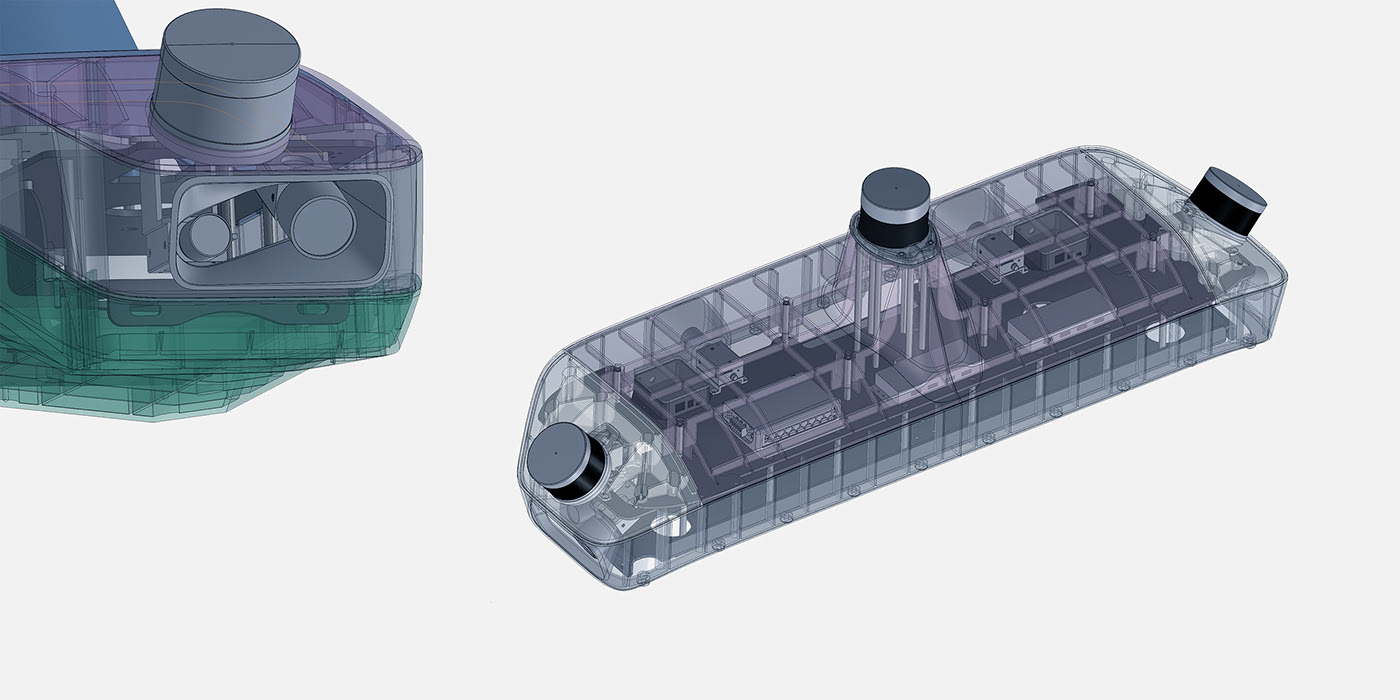
最大化视野:R1配备32通道激光雷达,四个16通道激光雷达,1通道激光雷达,8个摄像头和2个天线。 这些表面的设计旨在最大程度地提高LiDAR和摄像机的视野,同时保持圆滑的设计。
©2018-2020 NAVER保留所有权利。
作品来自于韩国设计团队
创意指导:金胜宇
设计:金胜宇,林敏京,河金敏
信息来源:behance
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
本作品转载于原创设计师 : NAVER
举报
1位TOP榜设计师点赞推荐

49赞 18评论 5312人气

266赞 97评论 13395人气

70赞 13评论 7064人气

33赞 11评论 7476人气


 关注
点赞
收藏
关闭弹幕
留言
关注
点赞
收藏
关闭弹幕
留言
确认要删除该条评论吗?
小小心意,大大鼓励
最高赞赏200元
使用支付宝扫描二维码完成支付
使用微信扫描二维码完成支付
当前余额:¥0.00
支付操作会向你普象账户的注册手机号发送验证码
请注意查收

扫一扫添加
普象商务

扫一扫添加
客服微信

扫一扫下载
手机APP

请关注公众号iamdesign或扫码关注
 沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
赞!