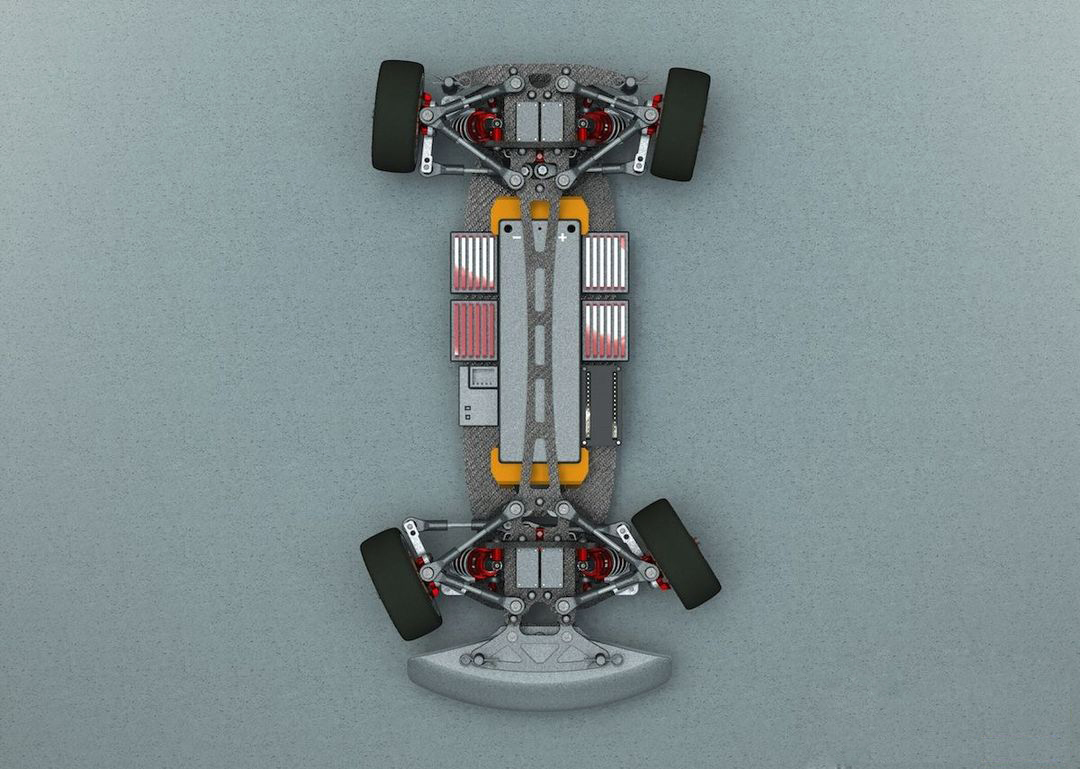
底盘材质:全碳纤维。 二楼板:全碳纤维。 车壳:Red。 驱动方式:四轮毂电机直驱 。 动力来源:锂电池。 车载电脑:Arduino Nano。 轴距:257mm 。 轮距:185mm。 构想简介:受新能源汽车和互联网汽车等未来汽车的发展概念的影响,构想了此遥控模型。车架规格按照1/10的比例进行了设计,采用常规的悬挂和避震布局,电池中置,四轮独立驱动、独立转向,采用四旋翼机的无刷外转子电机。四个轮胎装上此电机,它的动力、制动力、转向角度、转向左右差速均可分别控制,利用算法可以实现更加灵活多样的运行模式,达到人对汽车更丰富的 驾驶/巡航 乐趣!
 点评此图
点评此图
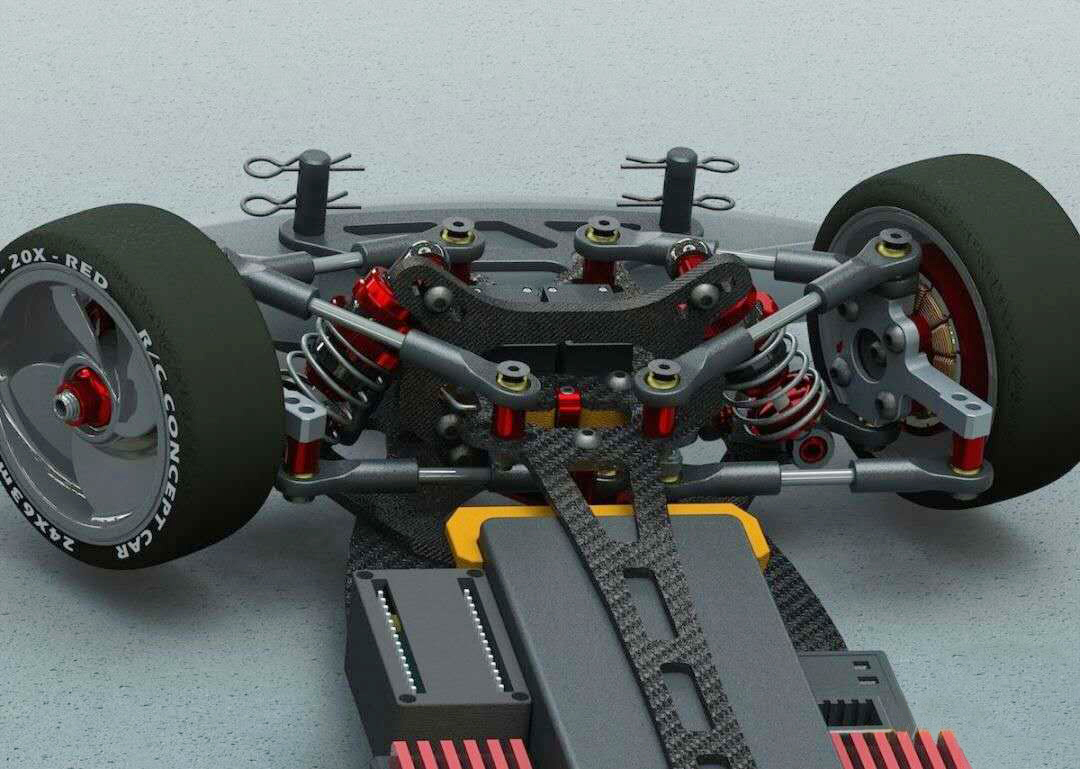
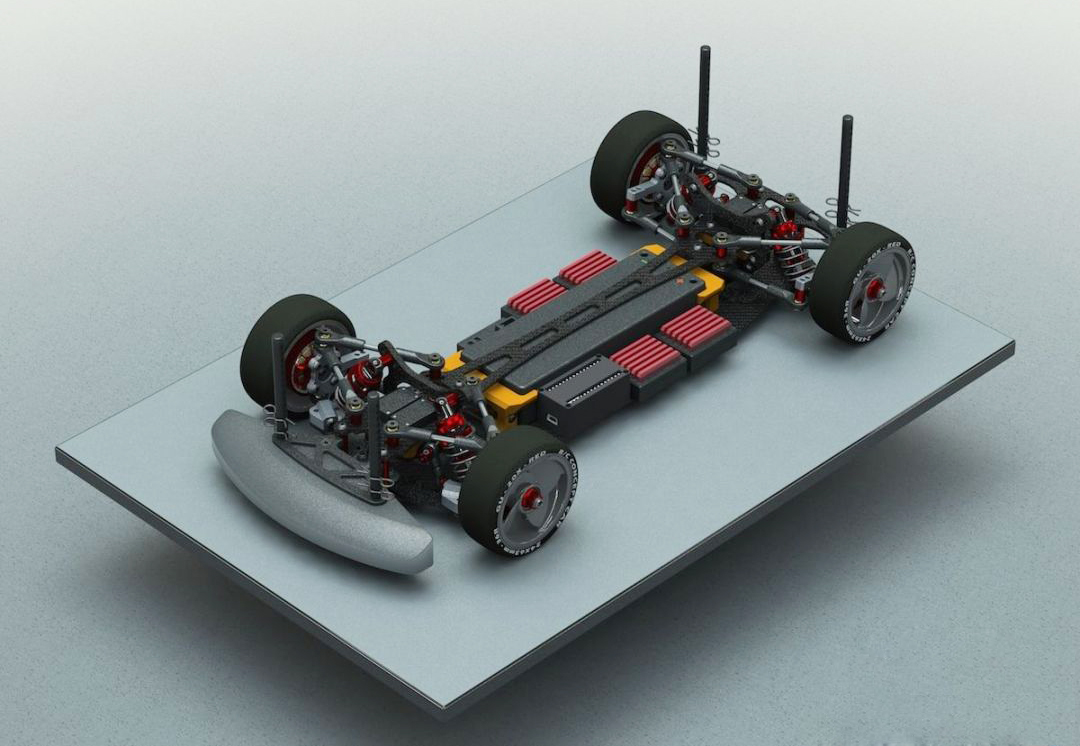
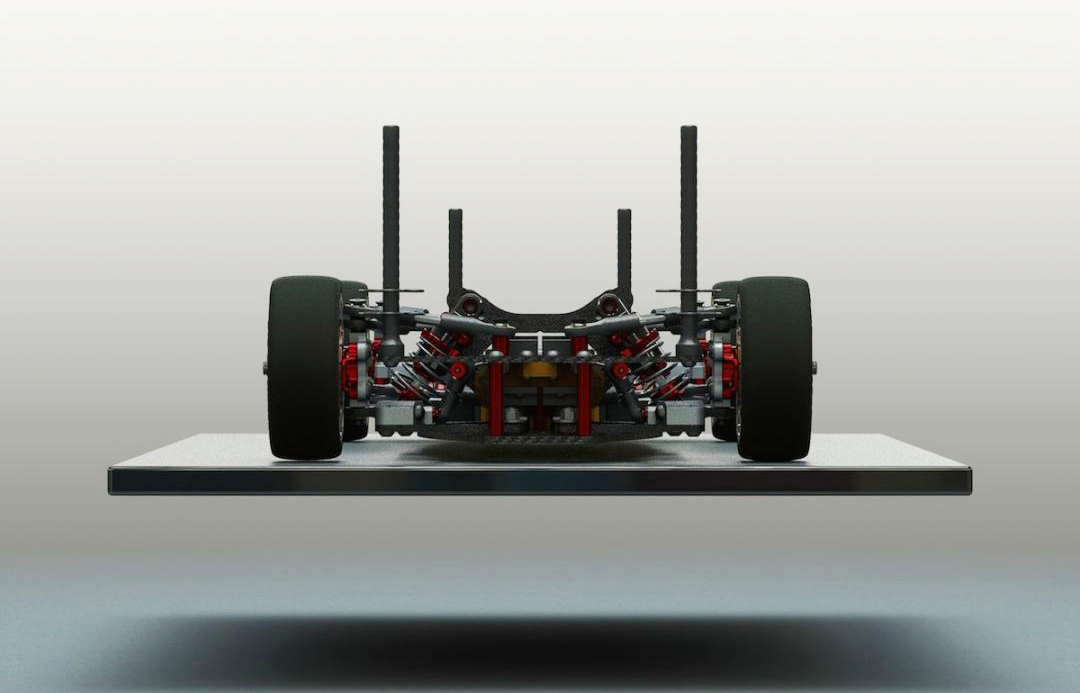
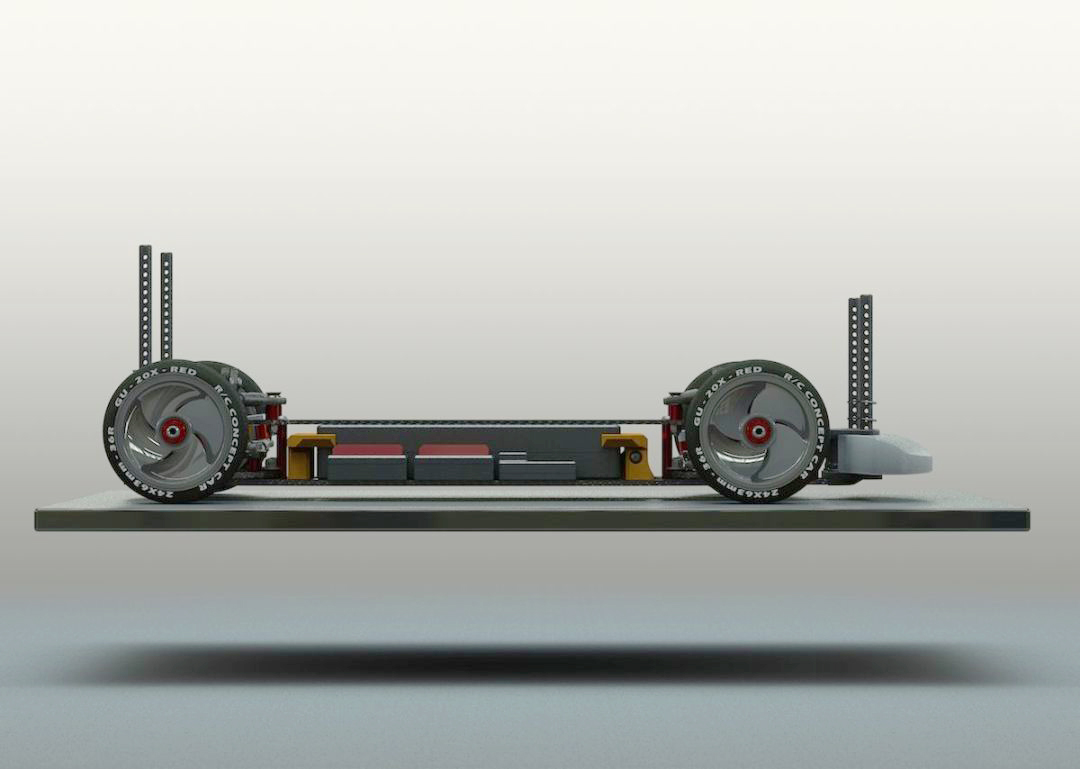
常规的悬挂和避震(Approx:62mm extende),电池(LiPo battery 7.4v 60c 2S2P 34.0Wh )中置, 四轮独立驱动、独立转向。
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
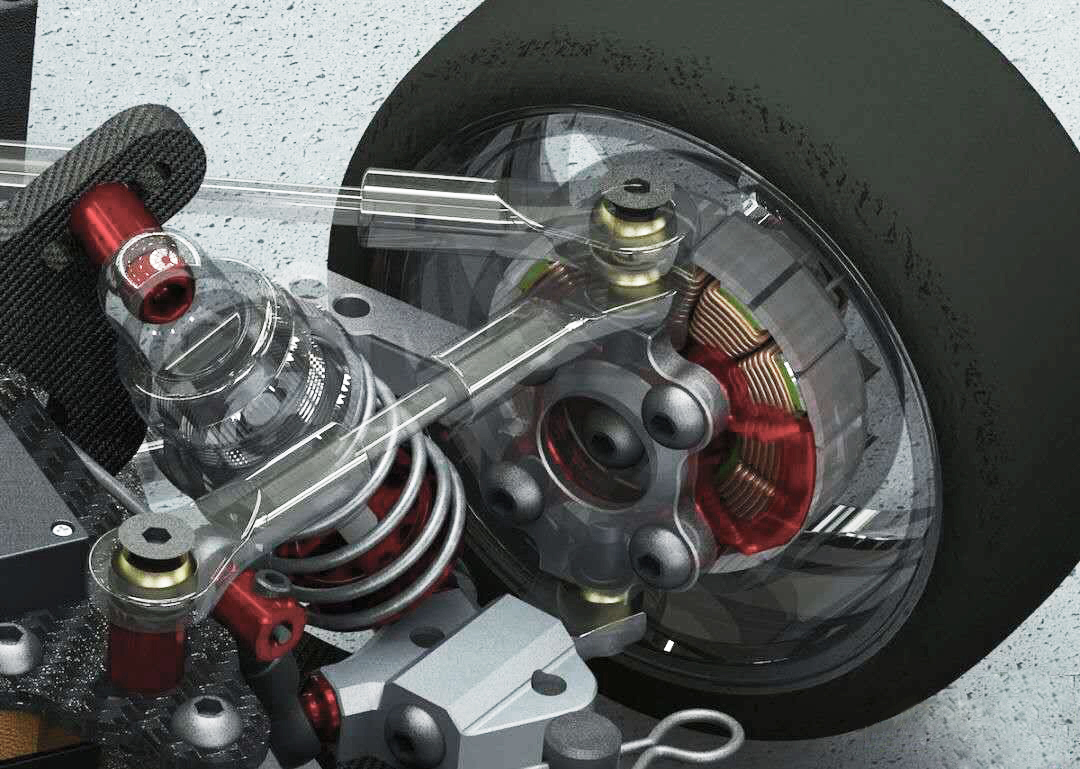
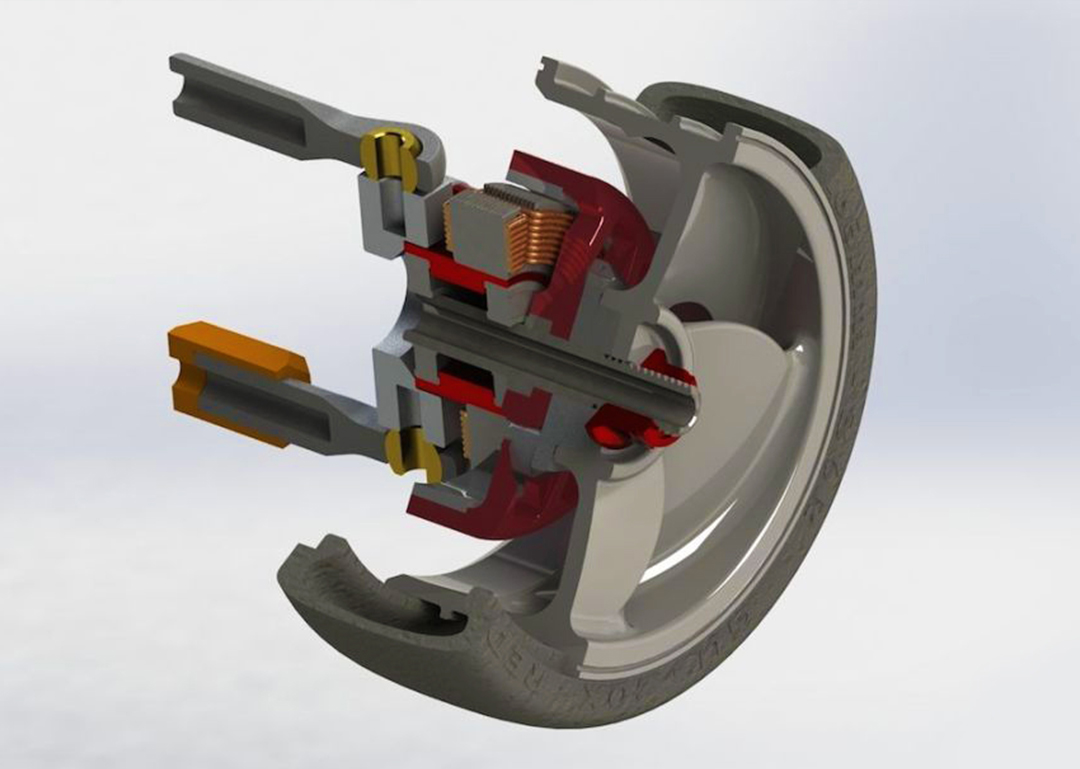
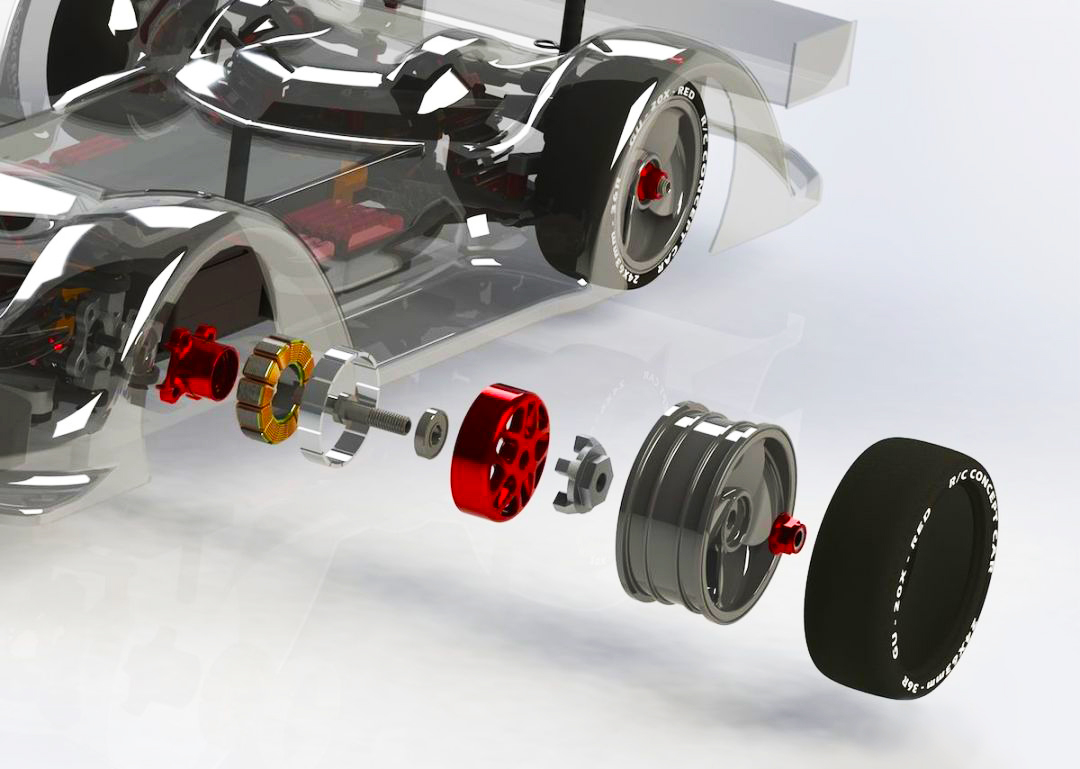
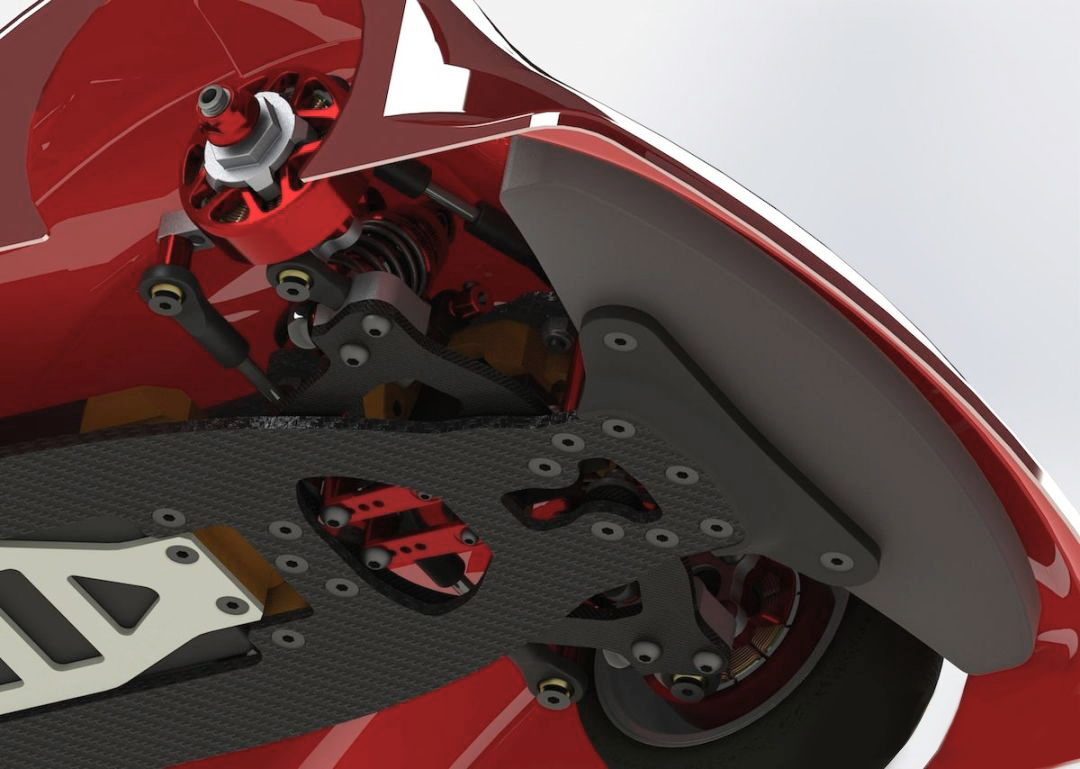
轮上电子驱动解剖图,没有了传统的刹车装置、差速锁。动力系统都合成在4个轮子的无刷外转子电机上,如同电动滑板车的驱动装置。利用计算机算法计算左右车轮速差、转向、制动力控制等。
 点评此图
点评此图
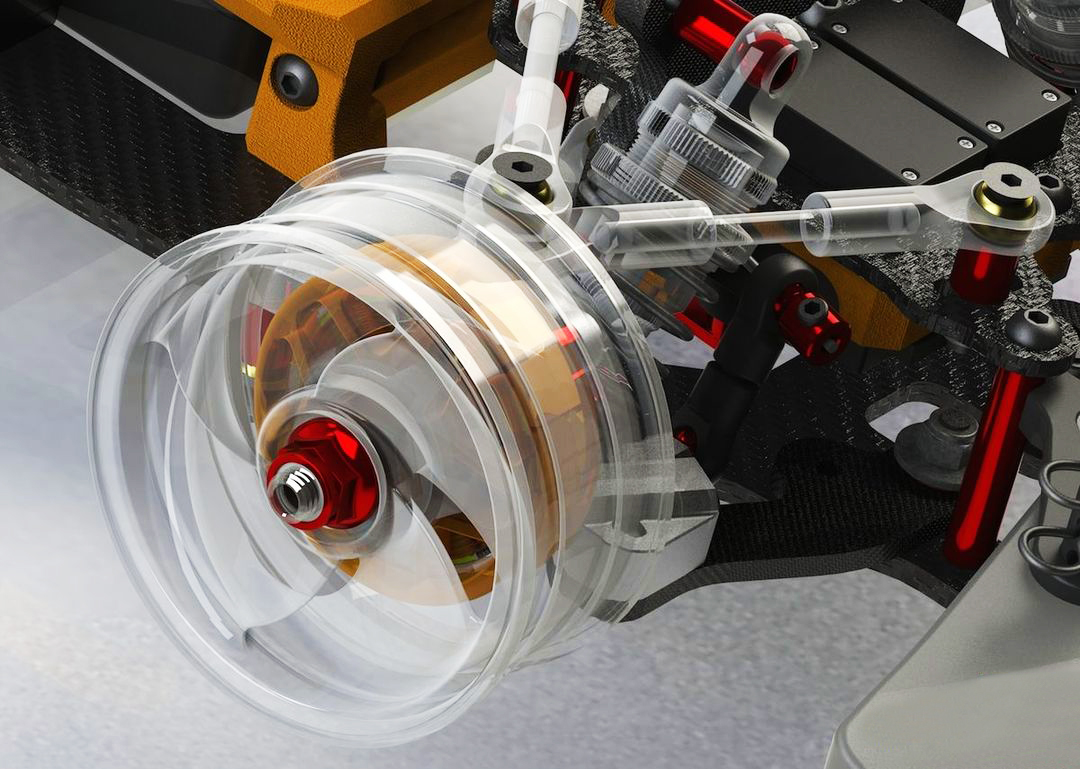
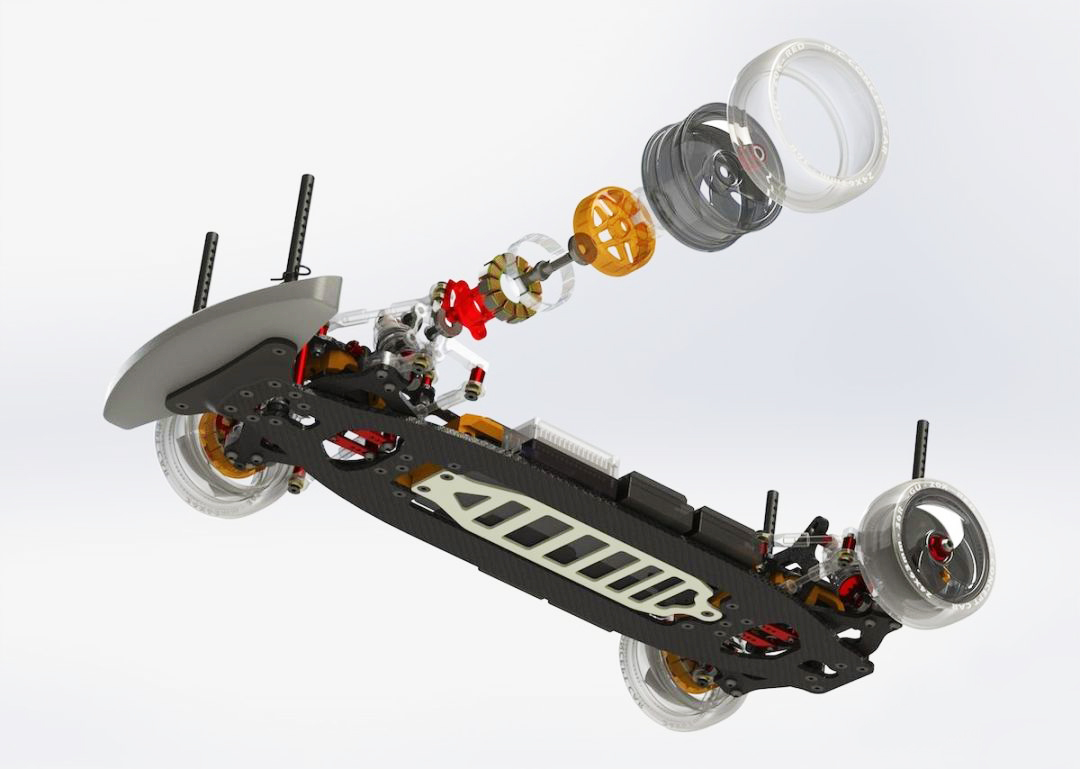
旋翼机的无刷外传子电机驱动与轮毂结合装配爆炸图分析
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
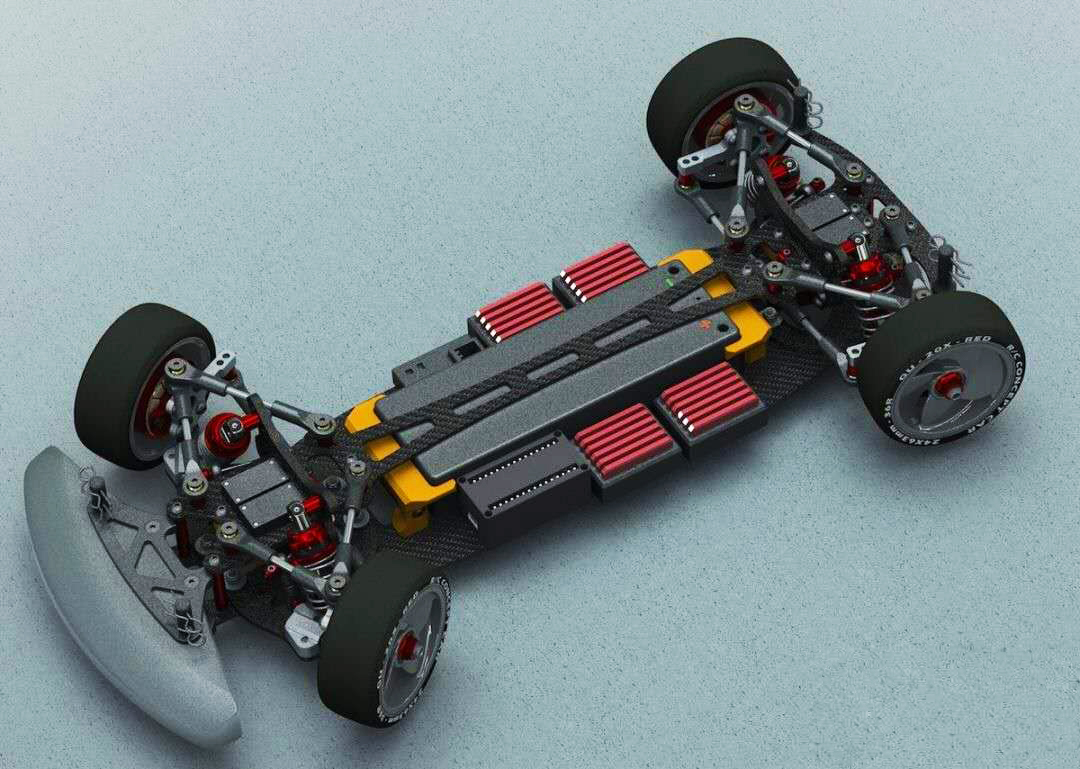
设计的优点是四个轮胎的动力、制动力、转向角度均可分别控制,可以实现更加灵活多样的运行模式。
 点评此图
点评此图
缺点主要有簧下质量的大幅增加,车轮滚动惯性一定量的增加,对动力输出、转向和制动力控制的程序较为复杂。目前好像在真车领域也尚不能靠电子系统完全模拟和取代机械式差速器。
 点评此图
点评此图
另外还有可以改进的地方就是现在的外传子无刷电机没有有感模式,无法测出轮胎转速,不能很好地分配动力/制动力的输出。
 点评此图
点评此图
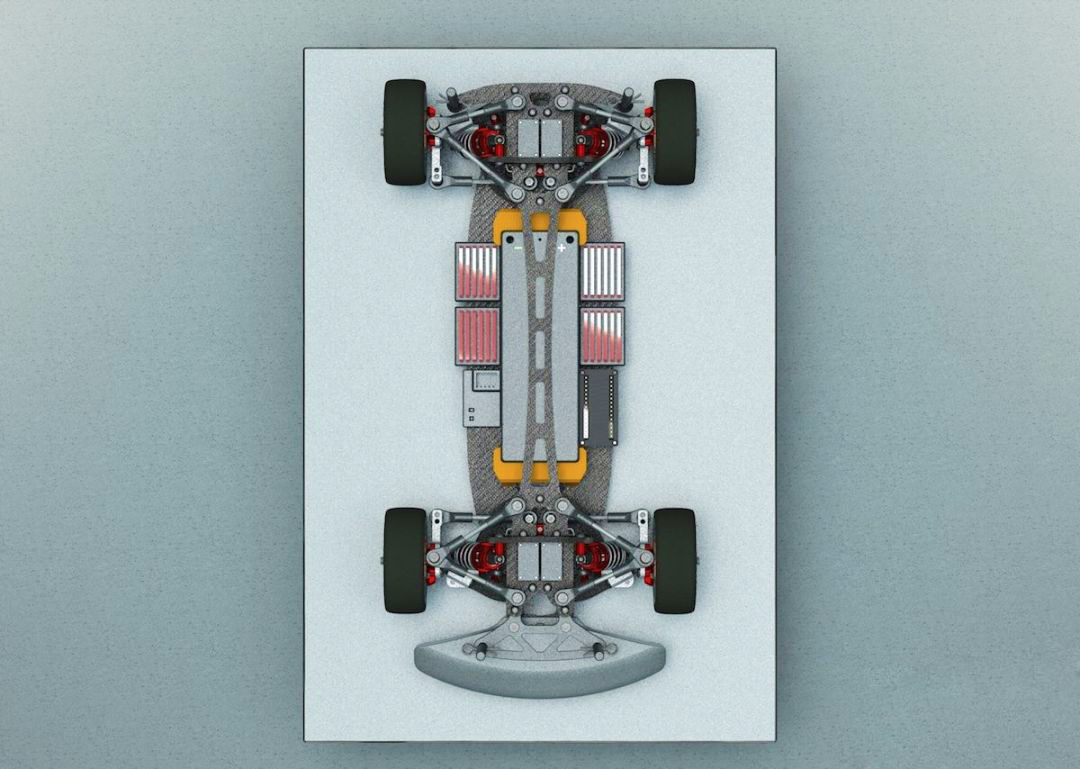
后视图:
 点评此图
点评此图
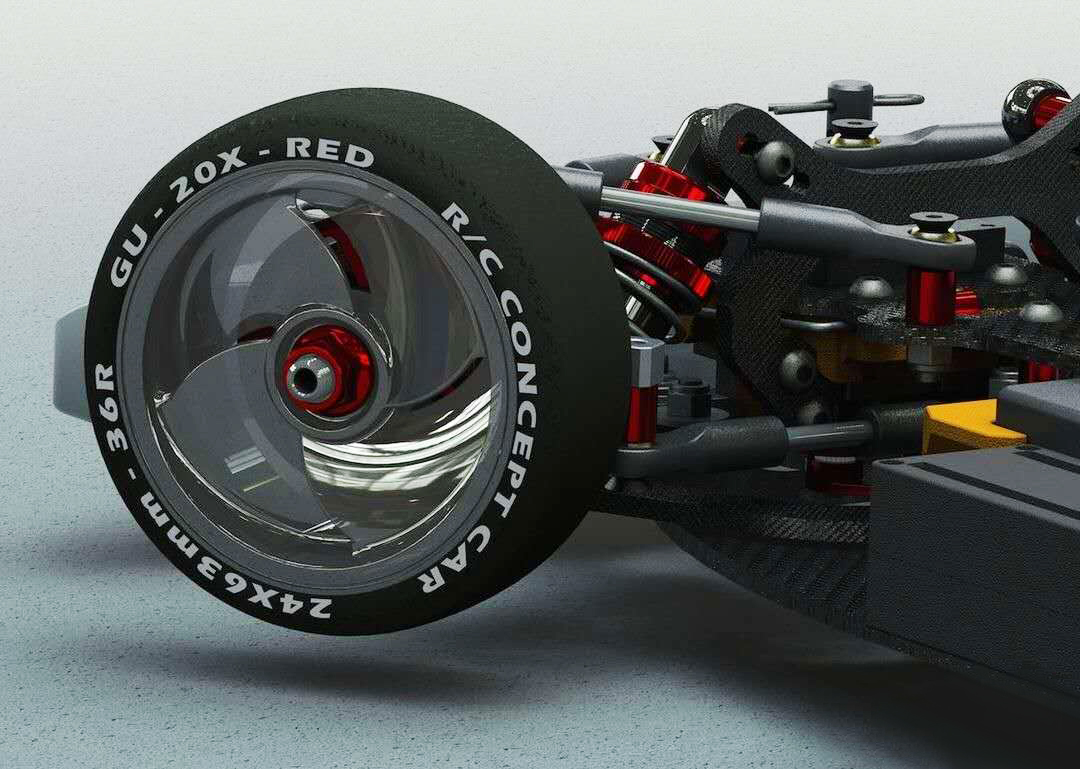
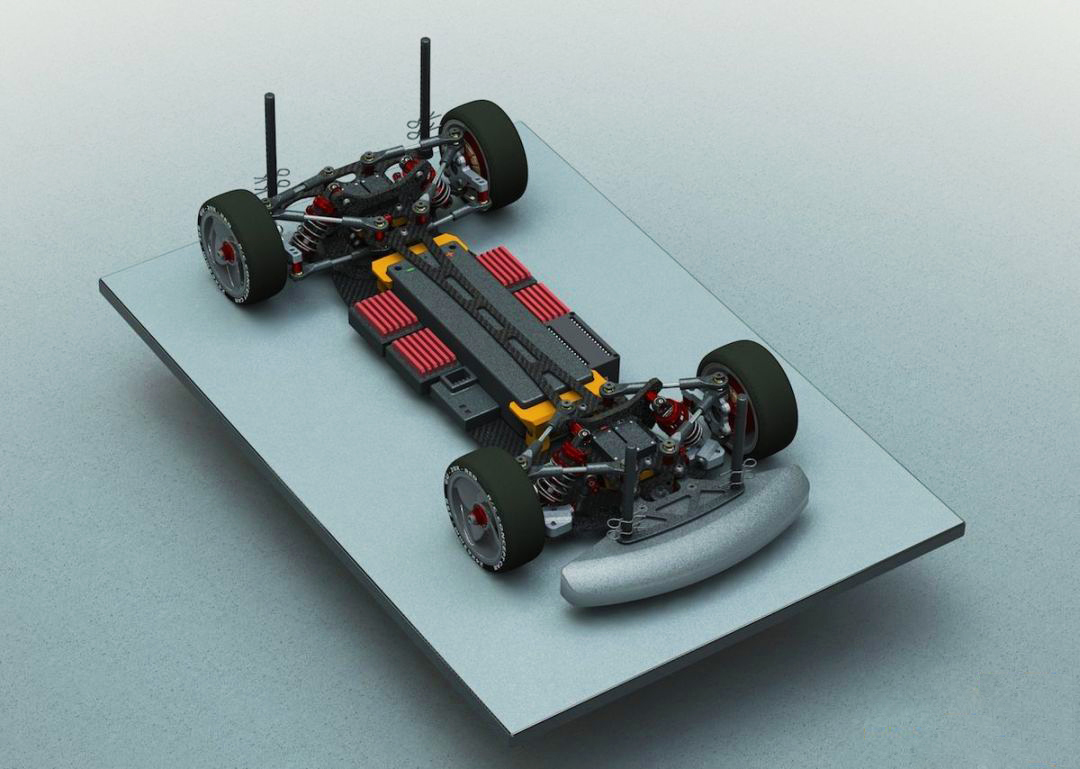
侧视图:
 点评此图
点评此图
 点评此图
点评此图
这个模型不能算是非常理想,但希望可以与模型汽车模型爱好者提供一些参考一起讨论评估此技术方法的可行性,也希望以后可以看到模型厂商制造出类似的玩具和模型。模型技术验证可行的话,在未来可能是一种全尺寸比例交通工具发展方向。
小小心意,大大鼓励
本作品版权归 EGOG 所有,禁止匿名转载及个人使用,任何商业用途均需联系原作者。
举报
14赞 8评论 2534人气

23赞 7评论 2757人气

24赞 13评论 3782人气

28赞 9评论 3835人气


 关注
点赞
收藏
关闭弹幕
留言
关注
点赞
收藏
关闭弹幕
留言
确认要删除该条评论吗?
小小心意,大大鼓励
最高赞赏200元
使用支付宝扫描二维码完成支付
使用微信扫描二维码完成支付
当前余额:¥0.00
支付操作会向你普象账户的注册手机号发送验证码
请注意查收

扫一扫添加
普象商务
扫一扫添加
客服微信

扫一扫下载
手机APP

请关注公众号iamdesign或扫码关注
 沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
两个前轮如果转的角度不同,会不会劈叉。
就是图片有些糊
可以起飞了
感觉好牛